FoehnX
FoehnX
Home
Publications
Contact
VIMO: Simultaneous Visual Inertial Model-based Odometry and Force Estimation
Barza Nisar
,
Philipp Foehn
,
Davide Falanga
,
Davide Scaramuzza
June 2019
PDF
Code
Video
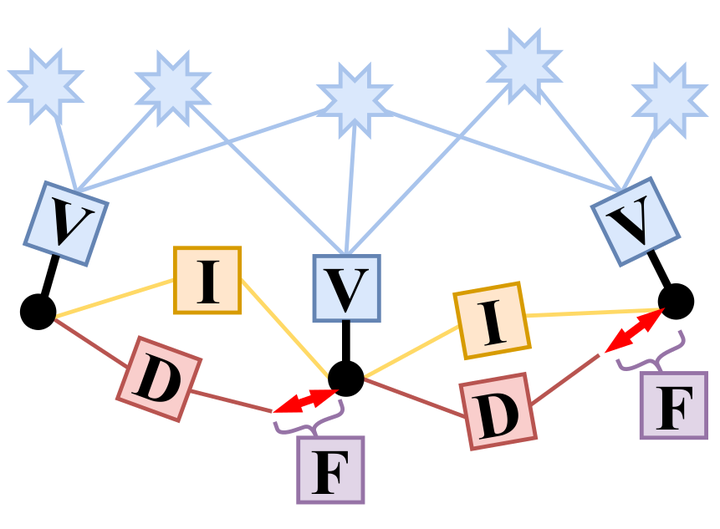
Visual-Inertial Model-based Odometry Pose Graph
Type
Conference paper
Publication
Robotics: Science and Systems
Optimization
Estimation
Quadrotor
Related
AlphaPilot: Autonomous Drone Racing
PAMPC: Perception-Aware Model Predictive Control for Quadrotors
Fast Trajectory Optimization for Agile Quadrotor Maneuvers with a Cable-Suspended Payload
Time-Optimal Planning for Quadrotor Waypoint Flight
Agilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight
Cite
×
 Visual-Inertial Model-based Odometry Pose Graph
Visual-Inertial Model-based Odometry Pose Graph
Visual-Inertial Model-based Odometry Pose Graph
Visual-Inertial Model-based Odometry Pose Graph